Amplificadores de Audio Clase D, Teoría y diseño
© Junio 2005, Sergio Sánchez Moreno (ColdAmp)
Edited & Additional Text by Rod Elliott (ESP)
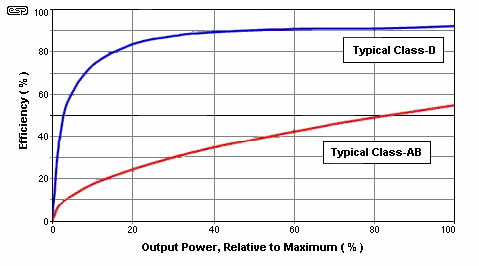
Una tecnología completamente nueva para la amplificación de audio ha estado evolucionando durante los últimos 15-20 años, una tecnología que tiene unos claros beneficios sobre las amplificadores actuales de Clase A y AB. Estamos hablando de la llamada “Clase D”. Este beneficio es principalmente su alta eficiencia energética. La Figura 1 muestra curvas de eficiencia típicas vs. Potencia de salida para diseños Clase-B y Clase-D.
La eficiencia máxima teórica de los diseños de Clase D es del 100%, y más del 90% es alcanzable en la práctica. Hay que tener en cuenta que esta eficiencia es alta desde niveles de potencia muy moderados hasta el recorte, mientras que el máximo del 78% en la Clase B se obtiene al inicio de la saturación. Una eficiencia de menos del 50% se realiza en el uso práctico con señales de música. La alta eficiencia de potencia del amplificador PWM se traduce en un menor consumo de energía para una potencia de salida determinada, pero, lo que es más importante, reduce drásticamente los requisitos del disipador de calor. Cualquiera que haya construido o visto un amplificador de audio de alta potencia ha notado que se necesitan grandes extrusiones de aluminio para mantener la electrónica relativamente fría. La carga en el transformador de potencia también se reduce en una cantidad sustancial, lo que permite el uso de un transformador más pequeño para la misma potencia de salida.
Estos disipadores de calor representan una parte importante del peso, costo y tamaño del equipo. A medida que vayamos profundizando en los detalles de esta topología, notaremos que un amplificador clase D de buen comportamiento (baja distorsión y rango completo) debe operar a frecuencias bastante altas, en el rango de 100KHz a 1MHz, necesitando una potencia y señal de muy alta velocidad. Esto históricamente ha relegado a esta clase D a usos donde no se requiere ancho de banda completo y donde niveles de distorsión más altos son tolerables, es decir, subwoofers y usos industriales.
Sin embargo, esto ha cambiado y gracias a los conmutadores más rápidos de la actualidad, con el conocimiento y el uso de técnicas avanzadas de retroalimentación es posible diseñar amplificadores de clase D de gran rendimiento que cubran toda la banda de audio. Estos cuentan con altos niveles de potencia, tamaño pequeño y baja distorsión, comparable a la de los buenos diseños de Clase-AB. (A partir de ahora, me referiré a las topologías Clase A y AB como “clásica”).

Desde la perspectiva DIY, la clase D no representa un avance importante. Debido a las velocidades de conmutación extremadamente altas, es esencial un diseño compacto y los SMD (dispositivos de montaje en superficie) son un requisito para obtener el rendimiento necesario. La capacitancia parásita y la inductancia de los componentes de orificio pasante convencionales es tal que es casi imposible hacer un amplificador PWM usando estas partes. De hecho, la gran mayoría de todos los circuitos integrados utilizados para esta aplicación están disponibles solo en montaje superficial, y un vistazo a cualquier amplificador PWM revela que los componentes convencionales apenas se usan en cualquier parte de la placa. Como las piezas SMD son tan difíciles de ensamblar a mano y el diseño de PCB es tan crítico para el rendimiento final, las versiones DIY de los amplificadores PWM son muy raras (no sé de ninguna).
2-Funcionamiento de los amplificadores clase D
En los amplificadores clásicos, al menos uno de los dispositivos de salida (ya sean transistores bipolares, MOSFET o válvulas) esta operativo en cualquier momento. Hasta el momento no ha sido problemático, pero hay que tener en cuenta que existe una corriente y una caída de voltaje entre colector-emisor / drenaje-fuente, etc.
La expresión P = V * I, nos indica la pérdidas de potencia, que ocurren incluso si no hay salida, ya que una pequeña cantidad de corriente pasará a través de los transistores para evitar la distorsión de cruce, por lo que hay algo de disipación. A medida que aumenta el voltaje de salida, para los carriles de suministro dados, la caída de voltaje a través de los transistores disminuirá, pero la corriente aumentará. En saturación, VCE o VDS serán bajos, pero la corriente será bastante alta (Vout / Rspk). Por el contrario, a bajos niveles de potencia, la corriente es pequeña pero la caída de voltaje es grande. Esto conduce a una curva de disipación de potencia que no es lineal con la potencia de salida. Hay una disipación mínima distinta de cero (eficiencia de cero por ciento) y un punto donde se alcanza la máxima eficiencia … aproximadamente 78% en diseños puros de Clase B, 25% o menos con Clase-A.
La clase D, por otro lado, basa su funcionamiento en dispositivos de salida de conmutación entre 2 estados, “encendido” y “apagado”. Antes de analizar los detalles específicos de esta tipología, podemos decir que en el estado “encendido”, una cantidad dada de corriente fluye a través del dispositivo, mientras que teóricamente no hay voltaje presente del drenaje a la fuente (sí, casi todas las clases D usarán MOSFET) , por lo tanto, la disipación de potencia es teóricamente cero. En el estado apagado, el voltaje será el total de los rieles de suministro, ya que se comporta como un circuito abierto, y no fluirá corriente (eso está muy cerca de la realidad).
¿Pero cómo puede nuestra señal de audio ser representada por una horrible onda cuadrada con solo dos niveles posibles? Bueno, de hecho modula algunas características de esta onda cuadrada para que la información esté allí. Ahora, “solo” tenemos que entender la forma en que se realiza la modulación y cómo restaurar la señal de audio amplificada a partir de ella. La técnica de modulación más común utilizada en Clase-D se llama PWM (modulación de ancho de pulso): se produce una onda cuadrada que tiene una frecuencia fija, pero el tiempo en los estados “alto” y “bajo” no siempre es del 50% , pero varía después de la señal entrante. De esta forma, cuando la señal de entrada aumenta, el estado “alto” estará presente por más tiempo que el estado “bajo”, y el opuesto cuando la señal es “baja”. Si hacemos algunas matemáticas, el valor medio de la señal en un solo ciclo es simplemente…
Vmean = Vhigh * D + Vlow * (1-D), where D = Ton / T
T es el período de la señal, es decir, 1 / Fsw (frecuencia de conmutación).
Por ejemplo, en el caso de un ciclo de trabajo del 50% (ambos estados están presentes durante exactamente la misma cantidad de tiempo) la señal que va de +50 V a -50 V es: 50 * 0.5 + (- 50) * 0.5 = 0V. De hecho, la salida inactiva (sin señal) de un amplificador de clase D es una conmutación de señal cuadrada con ciclo de trabajo del 50% del carril positivo al negativo.
Si modulamos la entrada hasta el máximo, tendremos un ciclo de trabajo de casi el 100%. Permite poner 99%: Vmean = 50 * 0.99 + (-50) * 0.01 = 49V. Por el contrario, si la señal es más baja, necesitamos cerca del 0% (tomemos el 1%), entonces Vmean = -49V.
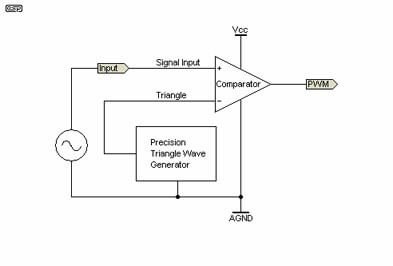
El PWM generalmente se genera comparando la señal de entrada con una forma de onda triangular, como se muestra en la Figura 2. La onda triangular define tanto la amplitud de entrada para la modulación completa como la frecuencia de conmutación.
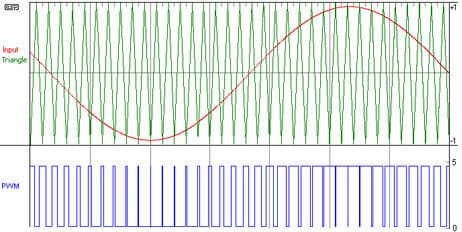
La figura siguiente muestra una señal de PWM típica modulada por una onda sinusoidal. Se observa que el diseño produce que las señales entre -1 y 1V produzcan de 0% a 100% de los ciclos de trabajo, 50% correspondiente a entrada de 0V. La salida ‘digital’ usa niveles lógicos estándar, donde 0V es un ‘0’ lógico y 5V es un ‘1’ lógico. Debido a esta digitalización de la señal, los amplificadores PWM a veces se denominan erróneamente amplificadores digitales. De hecho, todo el proceso es mucho más analógico que digital.
Se observa que para una representación correcta de la señal, la frecuencia de la forma de onda de referencia PWM debe ser mucho mayor que la de la frecuencia de entrada máxima. Siguiendo el teorema de Nyquist, necesitamos al menos el doble de esa frecuencia, pero los diseños de baja distorsión usan factores más altos (típicamente de 5 a 50). La señal PWM debe conducir circuitos de conversión de potencia para que se produzca una señal PWM de alta potencia, cambiando de los raíles de alimentación de + ve a -ve (suponiendo una topología de medio puente).
El espectro de una señal PWM tiene un componente de baja frecuencia que es una copia del espectro de señales de entrada, pero también contiene componentes a la frecuencia de conmutación (y sus armónicos) que deben eliminarse para reconstruir la señal modulante original. Se necesita un filtro de paso bajo de potencia para lograr esto. Por lo general, se usa un filtro LC pasivo, porque es (casi) sin pérdidas y tiene poca o ninguna disipación. Aunque siempre debe haber algunas pérdidas, en la práctica estas son mínimas.
3-Tipologías
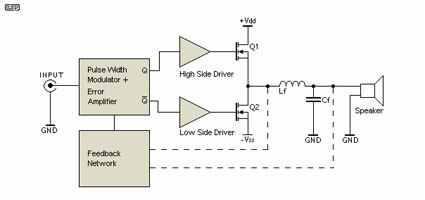
Básicamente, hay dos tipos de amplificadores clase D: el medio puente (se usan 2 dispositivos de salida) y puente completo (4 dispositivos de salida). Cada uno tiene sus propias ventajas. Por ejemplo, el medio puente es obviamente más simple y tiene más flexibilidad ya que medio puente se puede puentear como las tipologías clásicas. Si no está diseñado y manejado correctamente, puede sufrir fenómenos de “bombeo del bus” (transferencia de corriente a la fuente de alimentación que puede hacer que aumente su voltaje, produciendo situaciones peligrosas para el amplificador, el suministro y el altavoz). El puente completo requiere dispositivos de salida que usen la mitad del voltaje como un amplificador de medio puente de la misma potencia, pero es más complicado. Las figuras inferior muestra estas tipologías conceptualmente.
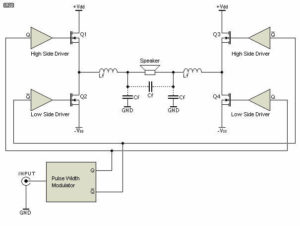
Hay que tener en cuenta que el amplificador PWM de puente completo solo necesita un raíl de suministro: los suministros bipolares no son necesarios, pero pueden seguir utilizándose. Cuando se utiliza un solo suministro, cada cable de altavoz tendrá ½ voltaje de Vdd presente. Como está conectado diferencialmente, el altavoz no ve ningún DC si todo está bien equilibrado. Sin embargo, esto puede (y hace) causar problemas si se permite que un cable de altavoz se acorte al chasis.
El filtro puede implementarse por medio de un solo condensador a través del altavoz, mediante un par de tapas a tierra, o en algunos casos por ambos (como se muestra por las líneas punteadas que conectan las tapas).
Para el resto del documento, nos concentraremos en topologías de medio puente, aunque la gran mayoría de las ideas también se aplican a diseños de puente completo.
Diseño de medio puente
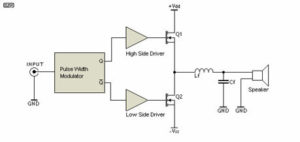
El funcionamiento del circuito de medio puente representado en la figura 4a es el siguiente
Cuando Q1 está activado (corresponde a la parte positiva del ciclo PWM), el nodo de conmutación (entrada del inductor) está conectado a Vdd, y la corriente comienza a aumentar a través de él. El diodo del cuerpo de Q2 está polarizado inversamente. Cuando Q2 está activado (parte negativa del ciclo PWM), el diodo del cuerpo de Q1 está polarizado inversamente y la corriente a través de Lf comienza a disminuir. La forma de onda actual en Lf tiene forma triangular.
Obviamente, solo uno de los transistores debe estar encendido en cualquier momento. Si por alguna razón ambos dispositivos se mejoran simultáneamente, se producirá un cortocircuito efectivo entre los rieles, lo que generará una gran corriente y la destrucción de los MOSFET. Para evitar esto, debe introducirse un “tiempo muerto” (un período pequeño donde ambos MOSFET están apagados).
Lf junto con Cf y el propio altavoz forman el filtro de paso bajo que reconstruye la señal de audio promediando el voltaje del nodo de conmutación.
El tiempo es fundamental en todo este proceso: cualquier error, ya que los retrasos o el tiempo de subida de los MOSFET afectarán en última instancia la eficiencia y la calidad del audio. Entonces todos los componentes involucrados deben ser de alta velocidad. El tiempo muerto también afecta el rendimiento y debe minimizarse. Al mismo tiempo, el tiempo muerto debe ser lo suficientemente largo para garantizar que bajo ninguna circunstancia ambos MOSFET estén encendidos al mismo tiempo. Los valores típicos son de 5 a 100ns.
El tiempo muerto es un factor crítico para el rendimiento de la distorsión. Para la menor distorsión, el tiempo muerto debe ser lo más pequeño posible, pero esto pone en riesgo las corrientes de “disparos”, donde ambos MOSFET están encendidos simultáneamente. Esto no solo aumenta la distorsión y la disipación de manera espectacular, sino que también destruirá rápidamente los dispositivos de salida. Si el tiempo muerto es demasiado grande, la respuesta de la etapa de salida ya no sigue la verdadera señal PWM generada en el modulador, por lo que la distorsión aumenta de nuevo. En este caso, la disipación no se ve afectada.
4- Gate Driving
Para asegurar tiempos de subida / bajada rápidos de los MOSFET, el controlador de compuerta debe proporcionar una corriente bastante alta para cargar y descargar la capacitancia de la compuerta durante el intervalo de conmutación. Por lo general, se necesitan 20 – 50 segundos de aumento / caída, que requieren más de 1 A de corriente de compuerta.
Tenga en cuenta que los esquemas que se muestran utilizan ambos MOSFET de canal N. Aunque algunos diseños usan dispositivos complementarios del canal N y P, eso es IMO subóptimo debido a la dificultad de obtener dispositivos P adecuados y pares apareados. Así que concentrémonos en medio-puente solo en N-canales. Tenga en cuenta que, para activar un MOSFET, debe haber una tensión superior a Vth entre su puerta y su fuente. El MOSFET inferior tiene su fuente conectada a -Vss, por lo que su circuito de accionamiento debe referirse a ese nodo en lugar de GND.
Sin embargo, el MOSFET superior es más difícil de manejar, ya que su fuente está continuamente flotando entre + Vdd y -Vss (menos caídas debido a la resistencia). Sin embargo, su controlador también debe estar flotando en el nodo de conmutación y, además, para el estado activado, su voltaje debe ser de varios voltios por encima de + Vdd, por lo que se crea un voltaje Vgs positivo cuando Q1 está activado. Esto también implica un cambio de voltaje para que el circuito del modulador pueda comunicarse correctamente con el conductor.
Esta es una de las principales dificultades del diseño Clase-D: compuerta de compuerta. Para resolver el problema, se toman varios enfoques
• Transmisión de compuerta: útil en suministros de energía de medio puente donde el ciclo de trabajo no varía ampliamente. Sin embargo, en los amplificadores de audio, el ciclo de trabajo varía de 0% a 100%, por lo que este método crea un problema porque la señal está acoplada a CA. Se necesita un circuito de restauración DC (no se muestra).
• Conducción discreta de la puerta: algunos diseños usan transistores para realizar el cambio de nivel y la unidad MOSFET. Nuevamente, hay un problema: necesitamos un voltaje que sea más alto que + Vdd.
• Controladores integrados: hay una serie de controladores MOSFET en el mercado, optimizados para alta velocidad, que se pueden usar. Nuevamente, se necesita un voltaje más alto que Vdd, así como un cambio de nivel.
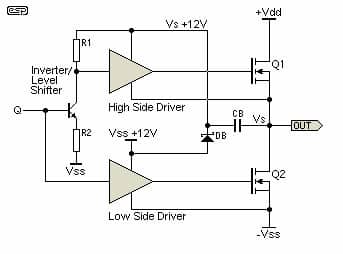
La Figura siguiente muestra algunas posibilidades para la conducción de puerta ‘High Side’

Tenga en cuenta que los circuitos en las figuras 5b y 5c tienen su entrada PWM referida a -Vss, por lo que puede requerir un cambio de nivel previo de la salida del comparador, que normalmente se referirá a GND. La figura 5a requerirá un cambio de nivel del PWM invertido solamente, ya que la entrada del transformador se puede hacer referencia a GND como se muestra. Muchos de los circuitos integrados de controlador disponibles ahora tienen cambios de nivel incorporados, y estos están optimizados para la velocidad. Recuerde que cualquier retraso introducido en la forma de onda de conmutación puede causar distorsión o conducción MOSFET simultánea.
Todavía tenemos un problema por resolver … obtener 12V por encima de VS (el nodo de conmutación). Podemos agregar otra fuente de alimentación, aislada de la principal, que (-) está conectada a VS. Esta solución puede ser poco práctica, por lo que otras técnicas se utilizan comúnmente. El más extendido es un circuito ‘bootstrap’. La técnica de arranque utiliza una bomba de carga construida con un diodo de alta velocidad y un condensador. La salida del amplificador produce los impulsos de conmutación necesarios para cargar el condensador.
De esta manera, la única fuente de alimentación auxiliar necesaria es 12V referenciada a -Vss que se utiliza para alimentar tanto el controlador de lado bajo como la bomba de carga para el controlador de lado alto. Como la corriente promedio de este suministro es baja (aunque hay altos picos de carga de corriente durante los eventos de conmutación, duran solo 20-50ns, dos veces durante un ciclo, por lo que el promedio es bastante bajo, en el rango de 50-80mA), esto el suministro se obtiene fácilmente del riel negativo con un simple regulador de 12 V (prestando atención a su máximo voltaje nominal de entrada, por supuesto).
5- Saltos entre niveles
Como se puede ver en las figuras anteriores, para excitar al controlador MOSFET, la señal PWM debe referirse a -Vss. Entonces, como el modulador generalmente funciona entre +/- 5 y +/- 12V, típicamente, se necesita una función de cambio de nivel. Uno puede elegir cambiar el nivel de la señal PWM y luego generar la versión invertida, o generar ambas salidas e invertir ambas. Depende, por ejemplo, del tipo de comparador utilizado (si hay salidas complementarias disponibles, se toma la decisión).
Se puede realizar una función básica de desplazamiento de nivel con un circuito de uno o dos transistores similar al ilustrado en la Figura 6 (antes del controlador de lado alto). Si bien esto puede funcionar a bajas frecuencias, es importante simular el comportamiento del comparador y la palanca de cambios de nivel, ya que pueden presentar retrasos considerables y errores de temporización si no están diseñados adecuadamente.
Es justo decir que la palanca de cambios de nivel es una de las partes más críticas del circuito, y esto se evidencia por la gran variedad de circuitos integrados de la competencia diseñados para el trabajo. Cada uno tendrá ventajas y desventajas, pero en todos los casos, la complejidad es mucho mayor de lo que implican los diagramas simplificados.
6- Diseño de la salida del filtro
El filtro de salida es una de las partes más importantes del circuito, ya que la eficiencia general, la fiabilidad y el rendimiento del audio dependen de ello. Como se indicó anteriormente, un filtro LC es el enfoque común, ya que es (teóricamente) sin pérdidas y tiene una pendiente de -40dB / década, lo que permite un rechazo razonable de la portadora si los parámetros del filtro y la frecuencia de conmutación están diseñados correctamente .
Lo primero que debe hacer es diseñar la función de transferencia para el filtro. Por lo general, se elige una respuesta de frecuencia de Butterworth o similar, con una frecuencia de corte ligeramente superior a la banda de audio (30-60 KHz). Tenga en cuenta que uno de los parámetros de diseño es la carga de terminación, es decir, la impedancia del altavoz. Por lo general, se supone una resistencia típica de 4 u 8 ohm, pero eso produciría variaciones en la respuesta de frecuencia medida en presencia de diferentes altavoces. Eso debe ser compensado por medio de un diseño de red de retroalimentación adecuado. Algunos fabricantes simplemente lo dejan así, por lo que la respuesta depende en gran medida de la carga. Sin duda, una cosa no deseable.
El diseño se puede hacer matemáticamente o simplemente usar uno de los muchos programas de software disponibles que ayudan en el diseño de filtros LC. Después de eso, una simulación siempre es útil. La Figura 7 muestra un filtro LC típico para amplificadores Clase-D y su respuesta de frecuencia típica.
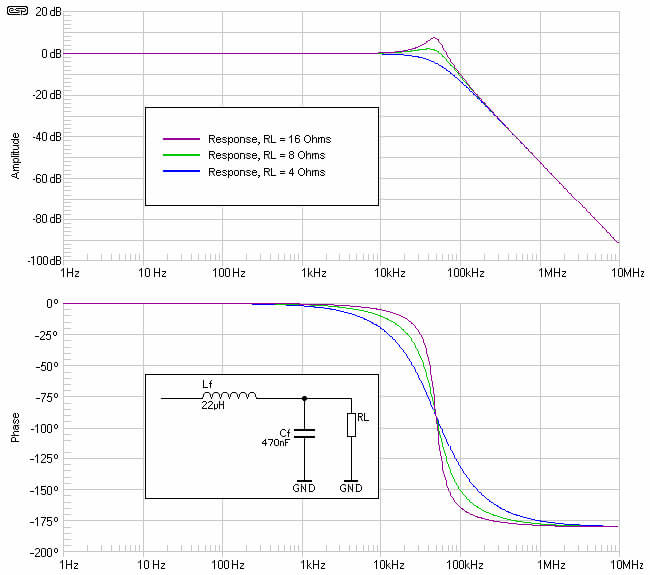
Este filtro simple tiene una frecuencia de corte de -3dB de 39 KHz (con carga de 4 ohmios) y suprime la portadora hasta 31dB a 300 KHz. Por ejemplo, si nuestros rieles de suministro son +/- 50V (suficiente para unos 275W a 4 ohmios), la ondulación residual tendrá una amplitud de aproximadamente 1Vrms.
Esta ondulación es, obviamente inaudible, y 1V RMS se disipará solo alrededor de 200 mW en un tweeter típico (no es probable que sea un problema, especialmente porque la impedancia de los tweeters será mucho mayor que 8 ohmios a 300 kHz). Sin embargo, se debe tener cuidado ya que los cables del altavoz pueden convertirse en una antena y afectar a otros equipos. De hecho, aunque un par de voltios RMS de rizado pueden parecer lo suficientemente bajos como para hacer funcionar sus parlantes de manera segura, EMI puede ser una preocupación, por lo que cuanto menos nivel de operador tenga, el mejor. Para mayor rechazo, se usan filtros de orden superior (con la desventaja potencial de un mayor desplazamiento de fase en la banda de audio), aunque hay otras maneras inteligentes de hacerlo, ya que los filtros de parada de banda o de ‘muesca’ muy ajustados a la frecuencia portadora (si es fijo, y eso solo ocurre en diseños sincrónicos como el descrito).
Los amplificadores de clase D bien diseñados tienen un filtro de orden superior y / o secciones especiales de supresión de portadora para evitar problemas con EMI. Como se puede ver en la Figura 8, la respuesta depende de la carga y, de hecho, la carga es parte del filtro. Este es uno de los problemas a resolver en los diseños de Clase-D. No ayuda que un altavoz presente una impedancia completamente diferente al amplificador que una carga de prueba, y muchos amplificadores PWM tienen filtros que no son (y nunca pueden ser) correctos para todas las cargas de parlantes prácticas. Nuevamente, solo un puñado de buenos amplificadores Clase-D usan técnicas de retroalimentación que incluyen el filtro de salida para compensar las variaciones de impedancia y tienen una respuesta de frecuencia casi independiente de la carga, así como para reducir la distorsión producida por las no linealidades en el filtro. Aunque se piensa que los componentes pasivos están libres de distorsiones, esto no se aplica a los núcleos de ferrita o hierro en polvo que se usan para los filtros. Estos componentes ciertamente introducen distorsión.
Ahora, los componentes del filtro …
El inductor de salida debe resistir toda la corriente de carga y también tener capacidad de almacenamiento, como en cualquier convertidor de conmutación no aislado (el diseño de medio puente de clase D es de hecho análogo a un convertidor de buck, siendo su voltaje de referencia la señal de audio).
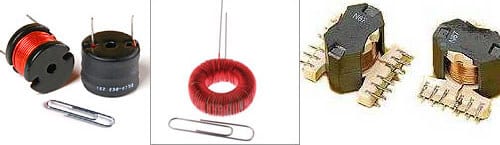
El inductor ideal (en términos de linealidad) es uno de núcleo de aire, pero el tamaño y número de vueltas requeridas para la típica operación Clase D generalmente lo hace poco práctico, por lo que normalmente se utiliza un núcleo para reducir el conteo de vueltas y también proporcionar un campo magnético confinado que reduce la EMI radiada. Los núcleos de polvo o materiales equivalentes son la opción común. También se puede hacer con núcleos de ferrita, pero deben tener un espacio de aire para evitar la saturación. El tamaño del alambre también se debe elegir cuidadosamente para que las pérdidas de DC sean bajas (requiriendo un alambre grueso) pero también se reduce el efecto de la piel (la resistencia de CA también debe ser baja).
La forma del núcleo del inductor puede ser un núcleo de tambor, núcleo RM de ferrita con huecos o núcleo de polvo toroidal, entre otros. Los núcleos de percusión tienen el problema de que su campo magnético no está encerrado, por lo tanto, producen una EMI más radiada. Los núcleos RM resuelven este problema pero tienen la mayor parte de la bobina encerrada, por lo que pueden surgir problemas de enfriamiento ya que no es posible el flujo de aire. IMO, los toroides son preferidos porque tienen un campo magnético cerrado que ayuda a controlar la EMI radiada, una estructura físicamente abierta que permite una refrigeración adecuada y un bobinado fácil y económico ya que no necesitan bobinas.
Muchos fabricantes principales, como Micrometals o Magnetics, ofrecen su propio software, muy útil para diseñar el inductor de salida, ya que ayudan a elegir el núcleo correcto, el tamaño del cable y los parámetros geométricos. El condensador generalmente cae en el rango de 200nF a 1uF y debe ser de buena calidad. El condensador es responsable (en parte) del comportamiento de alta frecuencia y necesita bajas pérdidas. Por supuesto, tiene que ser clasificado para todo el voltaje de salida, pero preferiblemente mucho más alto. Por lo general, se eligen condensadores de polipropileno y los condensadores de red X2 son comunes. ¡No hace falta decir que no puedes usar electrolíticos!
7-Feedback
Como dije anteriormente, los errores de tiempo pueden conducir a una mayor distorsión y ruido. Esto no se puede omitir y cuanto más preciso se mantenga, mejor será el rendimiento del diseño. Los amplificadores Clase D de bucle abierto probablemente no satisfagan las especificaciones más exigentes, por lo que la retroalimentación negativa es casi obligatoria. Hay varios enfoques. El más simple y común es tomar una fracción de la señal de conmutación, precondicionarla por medio de un filtro de paso bajo RC pasivo y alimentarlo de vuelta al amplificador de error.
Para decirlo simplemente, el amplificador de error es un opamp colocado en la ruta de la señal (antes del comparador PWM) que suma la señal de entrada con la señal de retroalimentación para generar una señal de error que los amplificadores minimizan automáticamente (este es el concepto de cada negativo Sistema de retroalimentación).
Aunque se obtienen buenos resultados de esta manera, todavía hay un problema: dependencia de la carga, debido a que el altavoz es una parte integral del filtro, y por lo tanto afecta su respuesta de frecuencia como se muestra arriba.
Algunos amplificadores más avanzados toman la señal de retroalimentación desde la misma salida, tratando de compensar esto. De esta manera, se obtiene una respuesta de frecuencia constante, con la ganancia adicional de que la resistencia del inductor contribuye mucho menos a la impedancia de salida, por lo que se mantiene menor, por lo que el factor de amortiguación es mayor (mayor control del parlante). Sin embargo, recibir comentarios después del filtro no es una tarea fácil. El LC introduce un polo y, por lo tanto, un cambio de fase que, si no se compensa adecuadamente, hará que el amplificador se vuelva inestable y, finalmente, oscile. La retroalimentación puede tomarse tanto del nodo de conmutación como de la salida del filtro. Aunque esto puede dar muy buenos resultados, todavía es difícil mantener la estabilidad debido al cambio de fase a través del filtro de salida.
8- Otros Tipos de amplificador D
Pure PWM (basado en generadores de triángulos, también llamado ‘muestreo natural PWM’) no es el único camino a seguir para construir un amplificador Clase-D. Han surgido varias otras topologías, muchas de ellas basadas en la autooscilación, donde la histéresis en el comparador y los retrasos entre el comparador y la etapa de potencia se pueden tener en cuenta para diseñar un sistema que oscila por sí mismo de una manera algo controlable.
Aunque es más simple, estos diseños tienen algunas desventajas, IMO. Por ejemplo, la frecuencia de conmutación no es fija, sino que depende de la amplitud de la señal. Esto hace que los filtros de corte de salida sean ineficaces, produciendo niveles de ondulación más altos. Cuando se unen varios canales, la diferencia en la frecuencia de conmutación entre ellos puede producir frecuencias de pulsación que pueden volverse audibles y muy molestas. Esto también puede suceder, por supuesto, con un diseño sincrónico como el que se describe aquí, pero hay una solución simple: use el mismo reloj para todos los canales
Algunos diseños auto oscilantes pueden tener algunas otras dificultades, como la puesta en marcha: es posible que se necesiten circuitos especiales que obliguen al oscilador a comenzar a oscilar. Por el contrario, si por alguna razón la oscilación se detiene, puede terminar con un MOSFET “siempre encendido” y, por lo tanto, una gran cantidad de CC en la salida, seguida casi de inmediato por un altavoz muerto. Por supuesto, estos problemas pueden resolverse con un diseño adecuado, pero la complejidad adicional puede anular la simplicidad inicial, por lo que no se obtiene ninguna ganancia.
La baja distorsión en un amplificador PWM requiere una forma de onda triangular muy lineal, junto con un comparador muy rápido y preciso. A las altas frecuencias de operación necesarias para un rendimiento general óptimo, los opamps utilizados deben tener un ancho de banda amplio, una velocidad de desplazamiento extremadamente alta y una excelente linealidad. Esto es costoso de lograr y requiere dispositivos premium. Algunas de estas restricciones se alivian en cierto modo por diseños auto oscilantes (por lo tanto, haciéndolos un poco más baratos), pero esto no es un compromiso efectivo en su mayor parte.
Los diseños sincronizados (frecuencia fija) no son más fáciles de hacer que los diseños de frecuencia de conmutación auto-oscilantes o modulados, pero son mucho más predecibles y tienden a tener menos problemas en general. La capacidad de sincronizar múltiples amplificadores asegura que se minimice la interferencia mutua. Una ‘ventaja’ reivindicada por los proponentes de diseños no sincronizados y de ‘conmutación aleatoria’ es que la energía de radiofrecuencia en los cables de los altavoces se distribuye en un amplio rango de frecuencias, lo que hace potencialmente más probable (o quizás menos probable) que dichos amplificadores pasen EMI pruebas. Desde una perspectiva general, es más probable que sea un obstáculo que un beneficio, ya que no es posible optimizar la red de filtro para un rechazo máximo de frecuencia de conmutación.
También hay amplificadores PWM que dicen ser verdaderamente ‘digitales’, usan la tecnología One-Bit ™ o generan la señal PWM directamente desde el flujo de datos PCM. Aunque los fabricantes de tales amplificadores naturalmente proclamarán su superioridad sobre todos los demás, tal auto-elogio generalmente debe ser ignorado. Implementar retroalimentación en un diseño digital ‘puro’ es, en el mejor de los casos, difícil, y puede ser imposible sin usar un DSP (procesador de señal digital) o recurrir a un sistema de retroalimentación analógica externa. La inclusión de ADCs y DAC adicionales (convertidores de analógico a digital y viceversa) es poco probable que permita que el amplificador sea “mejor” que los métodos analógicos directos descritos en este artículo.
Un recién llegado relativo a la escena es el modulador Sigma-Delta, sin embargo, al momento de escribir esto, todavía tiene problemas (desafíos en el habla corporativa). El problema principal es que la tasa de transición es demasiado alta, y debe reducirse para adaptarse a los componentes del mundo real, en particular los MOSFET de conmutación de potencia.
Las soluciones digitales “puras” descritas anteriormente tienen otro inconveniente, y ese es el hecho de que el número de diferentes anchos de pulso es finito y está determinado por la velocidad del reloj. Un sistema digital solo puede activar una transición de reloj. Según la información actualmente disponible, solo es posible realizar un sobremuestreo de aproximadamente 8 veces si se agrega un filtro digital de conformación de ruido al sistema. Un sistema de modulación analógica tiene un número efectivamente infinito de diferentes anchos de pulso, pero esto no es posible con cualquier implementación digital real.
Estos últimos comentarios cubren un área muy compleja, uno está fuera del alcance de este artículo. Sin embargo, incluso la escasa información anterior proporcionará a la mayoría de los lectores mucha más información que la que se encuentra comúnmente disponible, especialmente de los fabricantes de amplificadores digitales Clase-D.
9- Notas finales
En conclusión, los amplificadores de Clase-D han evolucionado mucho desde que se inventaron por primera vez, logrando niveles de rendimiento similares a los de los amplificadores convencionales, e incluso mejores en algunos aspectos, como una baja impedancia de salida inherente que permite bajos sin esfuerzo. Todo esto, con la gran ventaja de alta eficiencia. Por supuesto, solo si están diseñados correctamente. Sin embargo, aunque son muy atractivos, los diseños de Clase D no son muy amigables para bricolaje.
Con el fin de lograr un diseño que funcione correctamente en términos de eficiencia, rendimiento y EMI, la disposición de PCB muy cuidadosa es obligatoria, algunas selecciones de componentes son fundamentales y, por supuesto, la instrumentación adecuada es absolutamente necesaria. Este artículo ha sido escrito con el fin de arrojar algo de luz sobre los aspectos internos, ventajas y dificultades de esta tecnología no muy conocida (y aún menos conocida). Todos piensan que “Clase-D” significa “Digital”. Espero que después de leer este artículo, nadie piense que ya no
Si tienes cualquier duda o deseas un consejo personalizado escríbenos un comentario más abajo. Estaremos encantados de poder ayudarte. Además, puedes valorar este blog sobre el HyperSound Glass con las estrellas de la derecha.
User Review
( votes)OTROS ARTÍCULOS DEL BLOG

Mejores auriculares bluetooth black friday
MEJORES AURICULARES BLUETOOTH CALIDAD PRECIO BLACK FRIDAY [amazon table="28068"]¿Buscas los mejores auriculares inalámbricos para este Black Friday? A la hora de elegir los auriculares bluetooth que más nos convengan tenemos que tener en cuenta muchos factores...

Mejores Altavoces Bluetooth Black Friday
MEJORES ALTAVOCES BLUETOOTH CALIDAD PRECIO BLACK FRIDAY [amazon table="28063"] ¿Los mejores altavoces bluetooth Black Friday 2020? Los altavoces bluetooth deben su gran éxito por una parte a los omnipresentes smartphones en nuestras vidas y por otra a...

Llega a España Rebuy: La plataforma que transforma el mercado de segunda mano
Llega a España Rebuy: La plataforma que transforma el mercado de segunda mano Hace apenas unos meses que ha desembarcado en España Rebuy, una plataforma online de compra-venta de artículos tecnológicos de segunda mano que viene avalada por un gran éxito en Alemania...

NOVEDADES DEL IFA 2018 – AUDIO Y ELECTRÓNICA
NOVEDADES DE AUDIO DEL IFA 2018 DE BERLÍN Conoce lo que las principales firmas de sonido han presentado en esta edición del IFA Para los que no la conozcáis la IFA es una feria tecnológica que se celebra todos los años en la ciudad de Berlín, lugar en donde se reúnen...

APPLE AIRPODS ORIGINALES VS MEJORES COPIAS
LAS MEJORES COPIAS DE LOS APPLE AIRPODS Después del famoso modelo de auriculares de Apple, los Apple Earpods, la marca de la manzana ha decidido dar un paso más y adaptarse a los nuevos tiempos que corren creando unos auriculares sin cables y con una batería de larga...

AMAZON ALEXA YA HABLA ESPAÑOL Y LLEGA A ESPAÑA ACOMPAÑADO
AMAZON ALEXA YA HABLA ESPAÑOL Y LLEGA A ESPAÑA ACOMPAÑADO Los altavoces inteligentes Amazon Echo Dot y Amazon Echo contarán con el asistente virtual Alexa Amazon ha apostado por la introducción en el hogar de dispositivos domésticos inteligentes que puedan ser...

AURICULARES INTELIGENTES CAPACES DE LEER LA MENTE
AURICULARES INTELIGENTES CAPACES DE LEER LA MENTE Los AlterEgo saben lo que estás pensando y aciertan en un 92% de las veces. Estos auriculares inteligentes son capaces de leer tu mente y averiguar lo que estás pensando en todo momento. El cerebro es el encargado de...

ALTAVOCES INTELIGENTES, LA SIGUIENTE “BIG THING”
ALTAVOCES INTELIGENTES, LA SIGUIENTE “BIG THING” Conoce las principales familias de altavoces smart del mercado y las inteligencias artificiales que incorporan Altavoz inteligente… es una palabra que se escucha mucho hoy en día, de hecho, gigantes como Google,...

SIENTE LA “FUERZA” CON UN ALTAVOZ STAR WARS
SIENTE LA “FUERZA” CON UN ALTAVOZ STAR WARS Si eres un fan incondicional del mundo de George Lucas y necesitas coleccionar todos los productos de merchandising de star wars, ves ahorrando un poco porque aquí tienes más. Y es que Disney sabe muy bien como tener...
0 Comments